Hi,
I am working on a robotic grasping experiment and would like to compare the collision effects of different physics engines. I tried to add a physics tag in the world file but it did not work:
<physics name="default_physics" default="0" type="bullet">
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<real_time_update_rate>-1</real_time_update_rate>
<max_contacts>20</max_contacts>
</physics>
When I open gazebo, the parameters change but the physics engine name is still ODE
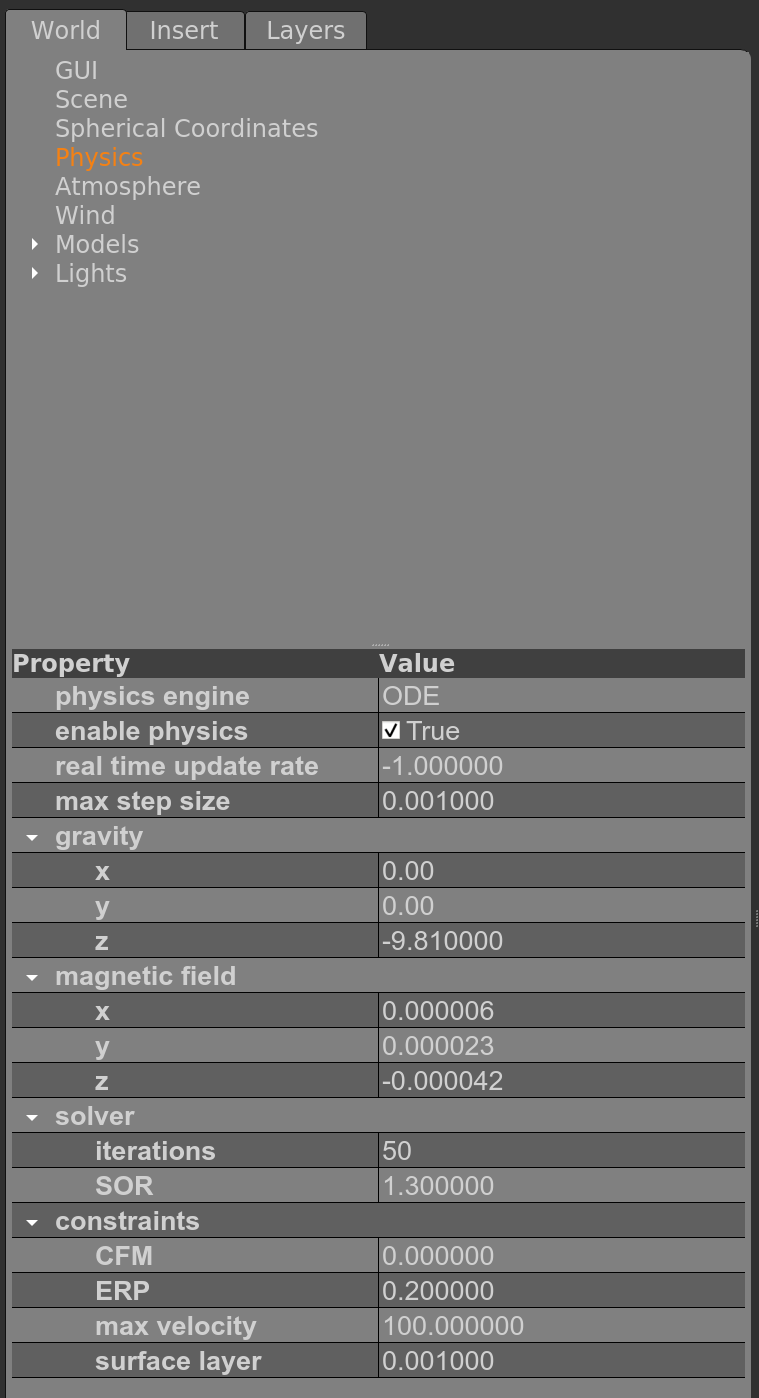
Can anyone guide me how to correctly change it?
Many thanks,
Rui
