2021-12-06 11:00:13,692 [Thread-130 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/status] removing connection to /rosbridge_websocket
2021-12-06 11:00:13,704 [Thread-130 ] [hbp_nrp_cles] [INFO] Cleaning up ROS nodes and services
2021-12-06 11:00:13,918 [Thread-2 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/logs] removing connection to /rosbridge_websocket
killing /gazebo
killed
/home/bbpnrsoa
/home/bbpnrsoa
[INFO] [2021.12.7 21:59:5 /home/bbpnrsoa/nrp/src/nest-simulator/nestkernel/rng_manager.cpp:217 @ Network::create_rngs_] : Creating default RNGs
[INFO] [2021.12.7 21:59:5 /home/bbpnrsoa/nrp/src/nest-simulator/nestkernel/rng_manager.cpp:260 @ Network::create_grng_] : Creating new default global RNG
-- N E S T --
Copyright © 2004 The NEST Initiative
Version: nest-2.18.0
Built: Oct 7 2021 12:29:52
This program is provided AS IS and comes with
NO WARRANTY. See the file LICENSE for details.
Problems or suggestions?
Visit https://www.nest-simulator.org
Type ‘nest.help()’ to find out more about NEST.
CSAConnector: libneurosim support not available in NEST.
Falling back on PyNN’s default CSAConnector.
Please re-compile NEST using --with-libneurosim=PATH
2021-12-07 21:59:32,520 [Thread-4 ] [rospy.intern] [INFO] topic[/rosout] adding connection to [/rosout], count 0
2021-12-07 21:59:32,550 [Thread-7 ] [hbp_nrp_cles] [INFO] Create new simulation request
2021-12-07 21:59:32,551 [Thread-7 ] [hbp_nrp_cles] [INFO] Preparing new simulation with /tmp/nrp.0.6po3akzg/experiment_configuration.exc config file
2021-12-07 21:59:32,574 [Thread-7 ] [SimConfig ] [INFO] Bibi absolute path: /tmp/nrp.0.6po3akzg/bibi_configuration.bibi
2021-12-07 21:59:32,576 [Thread-7 ] [SimConfig ] [INFO] Gazebo’s lockstep mode set to False
2021-12-07 21:59:32,576 [Thread-7 ] [SimConfig ] [INFO] Using physics engine ode
2021-12-07 21:59:32,576 [Thread-7 ] [hbp_nrp_cles] [INFO] Starting the experiment closed loop engine.
2021-12-07 21:59:32,576 [Thread-7 ] [hbp_nrp_cles] [INFO] Path is /tmp/nrp.0.6po3akzg
2021-12-07 21:59:32,577 [Thread-7 ] [hbp_nrp_cles] [INFO] No RNG seed specified in the exc, using random value.
2021-12-07 21:59:32,577 [Thread-7 ] [hbp_nrp_cles] [INFO] RNG seed = 5601645075387435659
2021-12-07 21:59:32,577 [Thread-7 ] [hbp_nrp_cles] [INFO] Setting up backend Notificator
2021-12-07 21:59:32,582 [Thread-7 ] [hbp_nrp_cles] [INFO] ROS notificator initialized
2021-12-07 21:59:32,582 [Thread-7 ] [hbp_nrp_cles] [INFO] Creating CLE Server
2021-12-07 21:59:32,604 [Thread-7 ] [hbp_nrp_cles] [INFO] gzserver arguments: --seed 5601645075387435659 -e ode /tmp/nrp.0.6po3akzg/empty_world_environment/empty_world.sdf
2021-12-07 21:59:32,604 [Thread-7 ] [hbp_nrp_cle.] [INFO] Starting gzserver
2021-12-07 21:59:32,653 [Thread-4 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/status] adding connection to [/rosbridge_websocket], count 0
Found /home/bbpnrsoa/.local/bin/gzserver
Starting gzserver: OK.
2021-12-07 21:59:35,638 [Thread-11 ] [hbp_nrp_watc] [INFO] Process gzserver could not be found
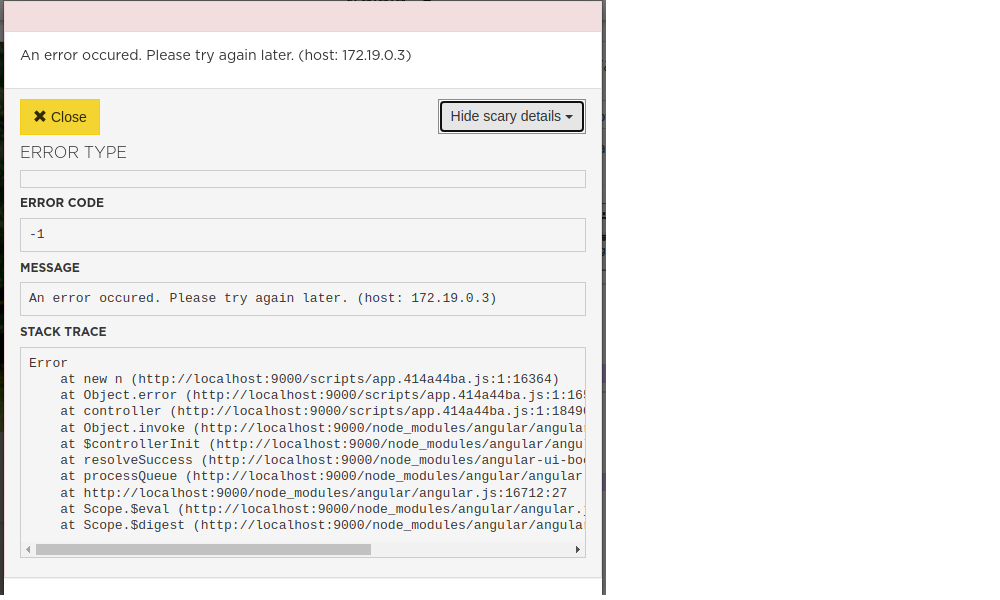
2021-12-07 21:59:35,639 [Thread-11 ] [hbp_nrp_cles] [ERROR] Gazebo died unexpectedly
NoneType: None
2021-12-07 21:59:36,642 [Thread-11 ] [hbp_nrp_watc] [INFO] Process gzserver could not be found
2021-12-07 21:59:37,644 [Thread-11 ] [hbp_nrp_watc] [INFO] Process gzserver could not be found
2021-12-07 21:59:54,051 [Thread-13 ] [rospy.intern] [INFO] topic[/clock] adding connection to [http://172.19.0.3:33695/], count 0
2021-12-07 21:59:54,063 [Thread-7 ] [hbp_nrp_cles] [WARNING] Previous task was not closed properly, closing it now.
2021-12-07 21:59:54,064 [Thread-7 ] [hbp_nrp_cle.] [INFO] Stopping gzserver
Stopping 1744: 2021-12-07 21:59:54,107 [/clock ] [rospy.intern] [INFO] topic[/clock] removing connection to http://172.19.0.3:33695/
OK.
2021-12-07 21:59:54,112 [Thread-7 ] [hbp_nrp_cles] [INFO] Shutting down ROS notificator
2021-12-07 21:59:54,112 [Thread-7 ] [hbp_nrp_cles] [INFO] Unregister error/transfer_function topic
2021-12-07 21:59:54,112 [Thread-7 ] [rospy.intern] [INFO] topic impl’s ref count is zero, deleting topic /ros_cle_simulation/cle_error…
2021-12-07 21:59:54,114 [Thread-7 ] [hbp_nrp_cles] [INFO] Unregister status topic
2021-12-07 21:59:54,114 [Thread-7 ] [rospy.intern] [INFO] topic impl’s ref count is zero, deleting topic /ros_cle_simulation/status…
2021-12-07 21:59:54,114 [Thread-7 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/status] removing connection to /rosbridge_websocket
2021-12-07 21:59:54,121 [Thread-7 ] [hbp_nrp_cles] [INFO] Cleaning up ROS nodes and services
killing /gazebo
killed
2021-12-07 21:59:57,146 [Thread-7 ] [hbp_nrp_cles] [ERROR] Initialization failed
Traceback (most recent call last):
File “/home/bbpnrsoa/nrp/src/ExDBackend/hbp_nrp_cleserver/hbp_nrp_cleserver/server/ROSCLESimulationFactory.py”, line 213, in create_new_simulation
launcher.initialize(self.except_hook)
File “/home/bbpnrsoa/nrp/src/ExDBackend/hbp_nrp_cleserver/hbp_nrp_cleserver/server/SimulationAssembly.py”, line 122, in initialize
self._initialize(except_hook)
File “/home/bbpnrsoa/nrp/src/ExDBackend/hbp_nrp_cleserver/hbp_nrp_cleserver/server/CLEGazeboSimulationAssembly.py”, line 103, in _initialize
self._start_gazebo(extra_models=self.simAssetsDir + ‘:’ + self.sim_dir)
File “/home/bbpnrsoa/nrp/src/ExDBackend/hbp_nrp_cleserver/hbp_nrp_cleserver/server/GazeboSimulationAssembly.py”, line 146, in _start_gazebo
self._notify(“Connecting to Gazebo simulation recorder”)
File “/home/bbpnrsoa/nrp/src/ExDBackend/hbp_nrp_cleserver/hbp_nrp_cleserver/server/SimulationAssembly.py”, line 144, in _notify
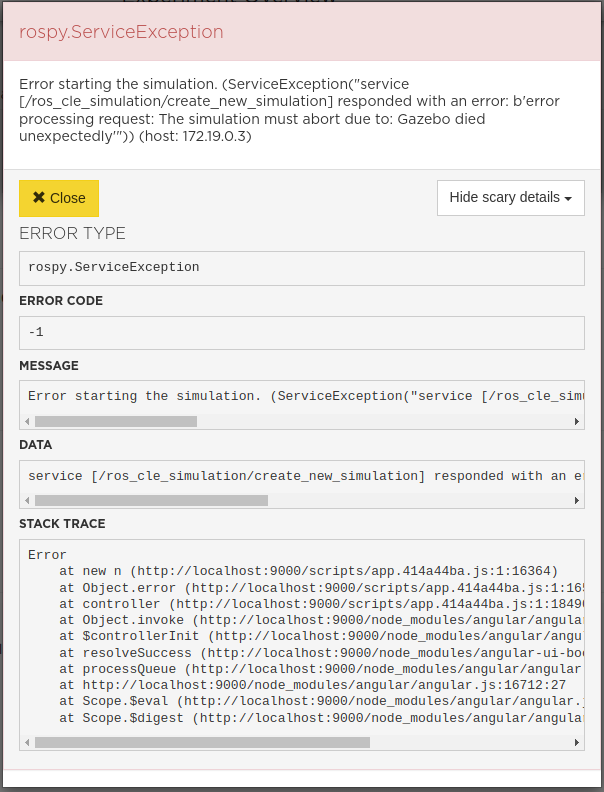
raise Exception("The simulation must abort due to: " + self._abort_initialization)
Exception: The simulation must abort due to: Gazebo died unexpectedly
(<class ‘Exception’>, Exception(‘The simulation must abort due to: Gazebo died unexpectedly’), <traceback object at 0x7f180931f040>)
2021-12-07 21:59:57,172 [Thread-7 ] [rosout ] [ERROR] Error processing request: The simulation must abort due to: Gazebo died unexpectedly
[‘Traceback (most recent call last):\n’, ’ File “/opt/ros/noetic/lib/python3/dist-packages/rospy/impl/tcpros_service.py”, line 633, in _handle_request\n response = convert_return_to_response(self.handler(request), self.response_class>
2021-12-07 22:00:15,775 [Thread-17 ] [hbp_nrp_cles] [INFO] Create new simulation request
2021-12-07 22:00:15,776 [Thread-17 ] [hbp_nrp_cles] [INFO] Preparing new simulation with /tmp/nrp.1.xenzsrv1/experiment_configuration.exc config file
2021-12-07 22:00:15,789 [Thread-17 ] [SimConfig ] [INFO] Bibi absolute path: /tmp/nrp.1.xenzsrv1/bibi_configuration.bibi
2021-12-07 22:00:15,791 [Thread-17 ] [SimConfig ] [INFO] Gazebo’s lockstep mode set to False
2021-12-07 22:00:15,791 [Thread-17 ] [SimConfig ] [INFO] Using physics engine ode
2021-12-07 22:00:15,791 [Thread-17 ] [hbp_nrp_cles] [INFO] Starting the experiment closed loop engine.
2021-12-07 22:00:15,792 [Thread-17 ] [hbp_nrp_cles] [INFO] Path is /tmp/nrp.1.xenzsrv1
2021-12-07 22:00:15,792 [Thread-17 ] [hbp_nrp_cles] [INFO] No RNG seed specified in the exc, using random value.
2021-12-07 22:00:15,792 [Thread-17 ] [hbp_nrp_cles] [INFO] RNG seed = 357096250045572988
2021-12-07 22:00:15,792 [Thread-17 ] [hbp_nrp_cles] [INFO] Setting up backend Notificator
2021-12-07 22:00:15,795 [Thread-17 ] [hbp_nrp_cles] [INFO] ROS notificator initialized
2021-12-07 22:00:15,796 [Thread-17 ] [hbp_nrp_cles] [INFO] Creating CLE Server
2021-12-07 22:00:15,814 [Thread-17 ] [hbp_nrp_cles] [INFO] gzserver arguments: --seed 357096250045572988 -e ode /tmp/nrp.1.xenzsrv1/empty_world_environment/empty_world.sdf
2021-12-07 22:00:15,814 [Thread-17 ] [hbp_nrp_cle.] [INFO] Starting gzserver
2021-12-07 22:00:15,853 [Thread-4 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/status] adding connection to [/rosbridge_websocket], count 0
Found /home/bbpnrsoa/.local/bin/gzserver
Starting gzserver: OK.
2021-12-07 22:00:19,860 [Thread-22 ] [rospy.intern] [INFO] topic[/clock] adding connection to [http://172.19.0.3:38115/], count 0
2021-12-07 22:00:19,957 [Thread-17 ] [hbp_nrp_cle.] [INFO] Restarting Gazebo web client communication adapter
Found /home/bbpnrsoa/nrp/src/gzweb/gzbridge/server.js
Starting node: OK.
2021-12-07 22:00:22,262 [Thread-17 ] [hbp_nrp_cles] [INFO] Preparing CLE Server
2021-12-07 22:00:22,281 [Thread-17 ] [hbp_nrp_cle.] [INFO] Robot control adapter initialized
2021-12-07 22:00:22,309 [Thread-17 ] [hbp_nrp_cle.] [INFO] neuronal simulator initialized
2021-12-07 22:00:22,310 [Thread-17 ] [hbp_nrp_cle.] [INFO] Initialize transfer functions node tfnode
2021-12-07 22:00:22,310 [Thread-17 ] [hbp_nrp_cle.] [INFO] NEST communication adapter initialized
2021-12-07 22:00:22,310 [Thread-17 ] [hbp_nrp_cle.] [WARNING] ROS node already initialized with another name
2021-12-07 22:00:22,317 [Thread-17 ] [hbp_nrp_cles] [INFO] Registering ROS Service handlers
2021-12-07 22:00:22,323 [Thread-24 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] adding connection to [http://127.0.0.1:42813/], count 0
2021-12-07 22:00:22,327 [Thread-25 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] adding connection to [http://172.19.0.3:42917/], count 1
2021-12-07 22:00:22,328 [Thread-17 ] [hbp_nrp_cles] [INFO] Registering ROS Service handlers
2021-12-07 22:00:22,330 [Thread-4 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] adding connection to [/ros_cle_simulation_459_1638910772165], count 0
2021-12-07 22:00:22,371 [Thread-17 ] [hbp_nrp_cles] [INFO] CLELauncher Finished.
2021-12-07 22:00:22,377 [Thread-17 ] [hbp_nrp_cles] [INFO] Initialization done
2021-12-07 22:00:22,377 [Thread-17 ] [hbp_nrp_cles] [INFO] Spawning new thread that will manage the experiment execution.
2021-12-07 22:00:22,391 [Thread-4 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] adding connection to [/nrp_backend], count 1
2021-12-07 22:00:22,478 [/ros_cle_sim] [transitions.] [INFO] Initiating transition from state created to state paused…
2021-12-07 22:00:22,479 [/ros_cle_sim] [transitions.] [INFO] Executing callback ‘initialize’ before transition.
2021-12-07 22:00:22,479 [/ros_cle_sim] [transitions.] [INFO] Exited state created
2021-12-07 22:00:22,479 [/ros_cle_sim] [transitions.] [INFO] Entered state paused
2021-12-07 22:00:22,479 [/ros_cle_sim] [transitions.] [INFO] Executed callback ‘<transitions.extensions.locking.LockedMethod object at 0x7f1808172f40>’ after transition.
Pose message filter parameters:
minimum seconds between successive messages: 0.02
minimum XYZ distance squared between successive messages: 0.00001
minimum Quaternion distance squared between successive messages: 0.0001
–-------------------------------------------------
Tue Dec 07 2021 22:00:23 GMT+0100 (CET) gzbridge Websocket is listening on port: 7681
2021-12-07 22:00:23,600 [Thread-4 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/cle_error] adding connection to [/rosbridge_websocket], count 0
2021-12-07 22:00:23,696 [Thread-4 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/logs] adding connection to [/rosbridge_websocket], count 0
Tue Dec 07 2021 22:00:24 GMT+0100 (CET) New request from: http://localhost:9000
Tue Dec 07 2021 22:00:24 GMT+0100 (CET) New connection accepted from: http://localhost:9000 ::ffff:127.0.0.1
2021-12-07 22:00:37,846 [Thread-57 ] [hbp_nrp_cles] [ERROR] An error occurred while preparing model http://schemas.humanbrainproject.eu/SP10/2017/model_config has no category elementBinding
2021-12-07 22:02:15,970 [Thread-58 ] [hbp_nrp_cles] [ERROR] An error occurred while preparing model http://schemas.humanbrainproject.eu/SP10/2017/model_config has no category elementBinding
2021-12-07 22:16:46,635 [Thread-60 ] [hbp_nrp_cles] [ERROR] An error occurred while preparing model http://schemas.humanbrainproject.eu/SP10/2017/model_config has no category elementBinding
2021-12-07 22:24:16,094 [Thread-18 ] [transitions.] [INFO] Initiating transition from state paused to state stopped…
2021-12-07 22:24:16,094 [Thread-18 ] [transitions.] [INFO] Executing callback ‘stop’ before transition.
2021-12-07 22:24:16,095 [Thread-18 ] [transitions.] [INFO] Exited state paused
2021-12-07 22:24:16,095 [Thread-18 ] [transitions.] [INFO] Entered state stopped
2021-12-07 22:24:16,096 [Thread-18 ] [hbp_nrp_comm] [INFO] Changing simulation lifecycle state from paused to stopped
2021-12-07 22:24:17,097 [Thread-18 ] [rospy.intern] [INFO] topic impl’s ref count is zero, deleting topic /ros_cle_simulation/1/lifecycle…
2021-12-07 22:24:17,098 [Thread-18 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] removing connection to http://127.0.0.1:42813/
2021-12-07 22:24:17,100 [Thread-18 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] removing connection to http://172.19.0.3:42917/
2021-12-07 22:24:17,104 [Thread-18 ] [rospy.intern] [INFO] topic impl’s ref count is zero, deleting topic /ros_cle_simulation/1/lifecycle…
2021-12-07 22:24:17,104 [Thread-18 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] removing connection to /ros_cle_simulation_459_1638910772165
2021-12-07 22:24:17,105 [Thread-18 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/1/lifecycle] removing connection to /nrp_backend
2021-12-07 22:24:17,108 [Thread-18 ] [transitions.] [INFO] Executed callback ‘<transitions.extensions.locking.LockedMethod object at 0x7f1808179490>’ after transition.
2021-12-07 22:24:17,109 [Thread-29 ] [transitions.] [INFO] Initiating transition from state stopped to state stopped…
2021-12-07 22:24:17,109 [Thread-29 ] [transitions.] [INFO] Executing callback ‘set_silent’ before transition.
2021-12-07 22:24:17,110 [Thread-29 ] [transitions.] [INFO] Exited state stopped
2021-12-07 22:24:17,110 [Thread-29 ] [transitions.] [INFO] Entered state stopped
2021-12-07 22:24:18,110 [Thread-29 ] [transitions.] [INFO] Executed callback ‘<transitions.extensions.locking.LockedMethod object at 0x7f18081793a0>’ after transition.
2021-12-07 22:24:18,112 [Thread-18 ] [transitions.] [INFO] Initiating transition from state stopped to state stopped…
2021-12-07 22:24:18,112 [Thread-18 ] [transitions.] [INFO] Executing callback ‘set_silent’ before transition.
2021-12-07 22:24:18,113 [Thread-18 ] [transitions.] [INFO] Exited state stopped
2021-12-07 22:24:18,113 [Thread-18 ] [transitions.] [INFO] Entered state stopped
2021-12-07 22:24:19,112 [Thread-29 ] [hbp_nrp_cles] [INFO] Finished main loop
2021-12-07 22:24:19,113 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutdown simulation
2021-12-07 22:24:19,114 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down simulation recorder services
2021-12-07 22:24:19,114 [Thread-18 ] [transitions.] [INFO] Executed callback ‘<transitions.extensions.locking.LockedMethod object at 0x7f18081793a0>’ after transition.
2021-12-07 22:24:19,118 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down simulation recorder
2021-12-07 22:24:23,885 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down the closed loop service
2021-12-07 22:24:23,886 [Thread-29 ] [hbp_nrp_cle.] [INFO] Shutting down the world simulation
2021-12-07 22:24:23,887 [Thread-29 ] [hbp_nrp_cle.] [INFO] Robot control adapter stopped
2021-12-07 22:24:23,887 [Thread-29 ] [hbp_nrp_cle.] [INFO] neuronal simulator ended
2021-12-07 22:24:25,889 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down get_transfer_functions service
2021-12-07 22:24:25,895 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down activate_transfer_function service
2021-12-07 22:24:25,897 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down add_transfer_function service
2021-12-07 22:24:25,900 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down set_transfer_function services
2021-12-07 22:24:25,902 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down delete_transfer_function services
2021-12-07 22:24:25,904 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down get_brain service
2021-12-07 22:24:25,907 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down set_brain service
2021-12-07 22:24:25,909 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down get_populations service
2021-12-07 22:24:25,911 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down get_populations service
2021-12-07 22:24:25,913 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down get_CSV_recorders_files service
2021-12-07 22:24:25,915 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down clean_CSV_recorders_files service
2021-12-07 22:24:25,917 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down get_robots service
2021-12-07 22:24:25,919 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down add_robot service
2021-12-07 22:24:25,921 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down delete_robot service
2021-12-07 22:24:25,922 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down set_robot_initial_pose service
2021-12-07 22:24:25,924 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down prepare_custom_model service
2021-12-07 22:24:25,926 [Thread-29 ] [hbp_nrp_cle.] [INFO] Stopping Gazebo web client communication adapter
Stopping node: OK.
2021-12-07 22:24:25,935 [Thread-29 ] [hbp_nrp_cle.] [INFO] Stopping gzserver
Stopping 1966: OK.
2021-12-07 22:24:25,957 [Thread-29 ] [hbp_nrp_cles] [INFO] Shutting down ROS notificator
2021-12-07 22:24:25,958 [Thread-29 ] [hbp_nrp_cles] [INFO] Unregister error/transfer_function topic
2021-12-07 22:24:25,958 [Thread-29 ] [rospy.intern] [INFO] topic impl’s ref count is zero, deleting topic /ros_cle_simulation/cle_error…
2021-12-07 22:24:25,958 [Thread-29 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/cle_error] removing connection to /rosbridge_websocket
2021-12-07 22:24:25,961 [Thread-29 ] [hbp_nrp_cles] [INFO] Unregister status topic
2021-12-07 22:24:25,961 [Thread-29 ] [rospy.intern] [INFO] topic impl’s ref count is zero, deleting topic /ros_cle_simulation/status…
2021-12-07 22:24:25,961 [Thread-29 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/status] removing connection to /rosbridge_websocket
2021-12-07 22:24:25,971 [/clock ] [rospy.intern] [INFO] topic[/clock] removing connection to http://172.19.0.3:38115/
2021-12-07 22:24:25,972 [Thread-29 ] [hbp_nrp_cles] [INFO] Cleaning up ROS nodes and services
2021-12-07 22:24:26,113 [Thread-2 ] [rospy.intern] [INFO] topic[/ros_cle_simulation/logs] removing connection to /rosbridge_websocket
killing /gazebo
killed